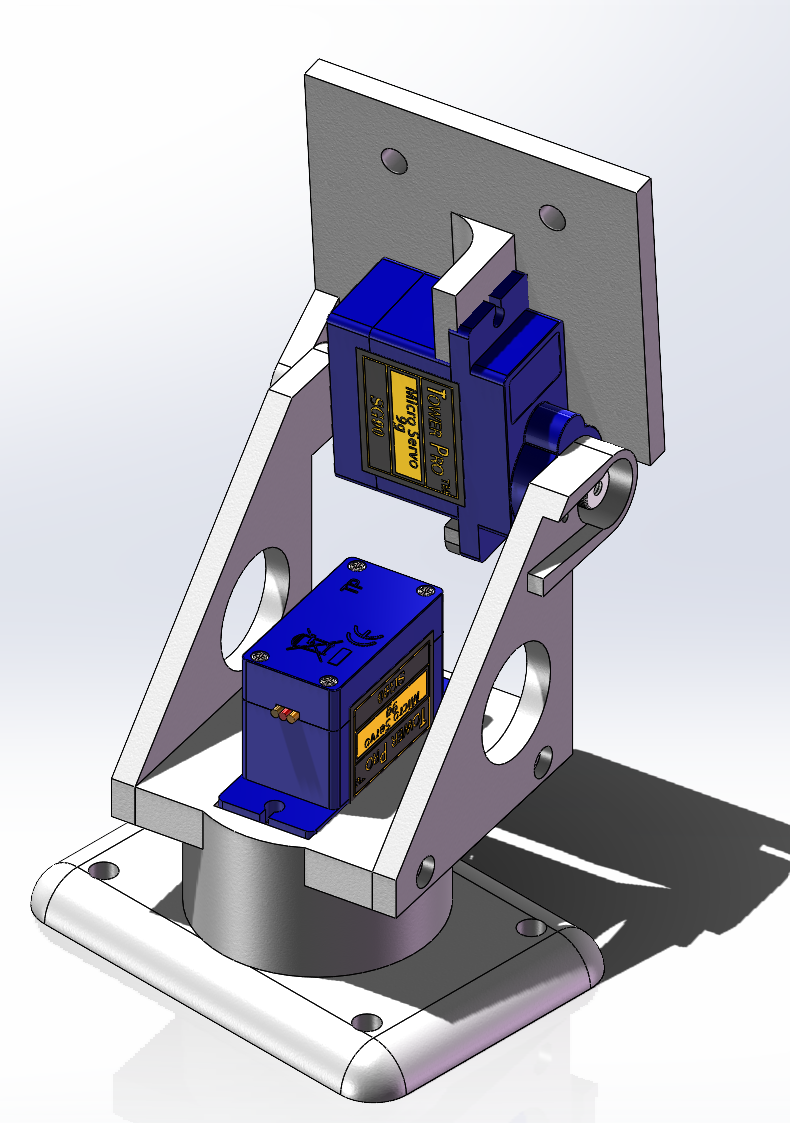
Modelling & Control of a Gimbal Stabilizer
Dynamics Model Posted
- Development of a self-tracking vehicle with tennis-ball-recognition
- Focusing on image recognition algorithm and object tracking method in the Tracking System
- Training and testing the image recognition model (YOLO v3) on the camera module for better effects of tennis ball recognition
- Implementation of a PID controller for the servos in the stabilizer to achieve object tracking
- Model the stabilizer dyanmics and evaluate the system robustness by root-locus and time-domain specifications
- Implementing and testing the functionality of the tracking system
