
Development & Motion Analysis of Robot Swimmer
Instructor: Dr. K. Alex Shorter
Mechanical Engineering, University of Michigan
Simulation of Dynamics Model Available
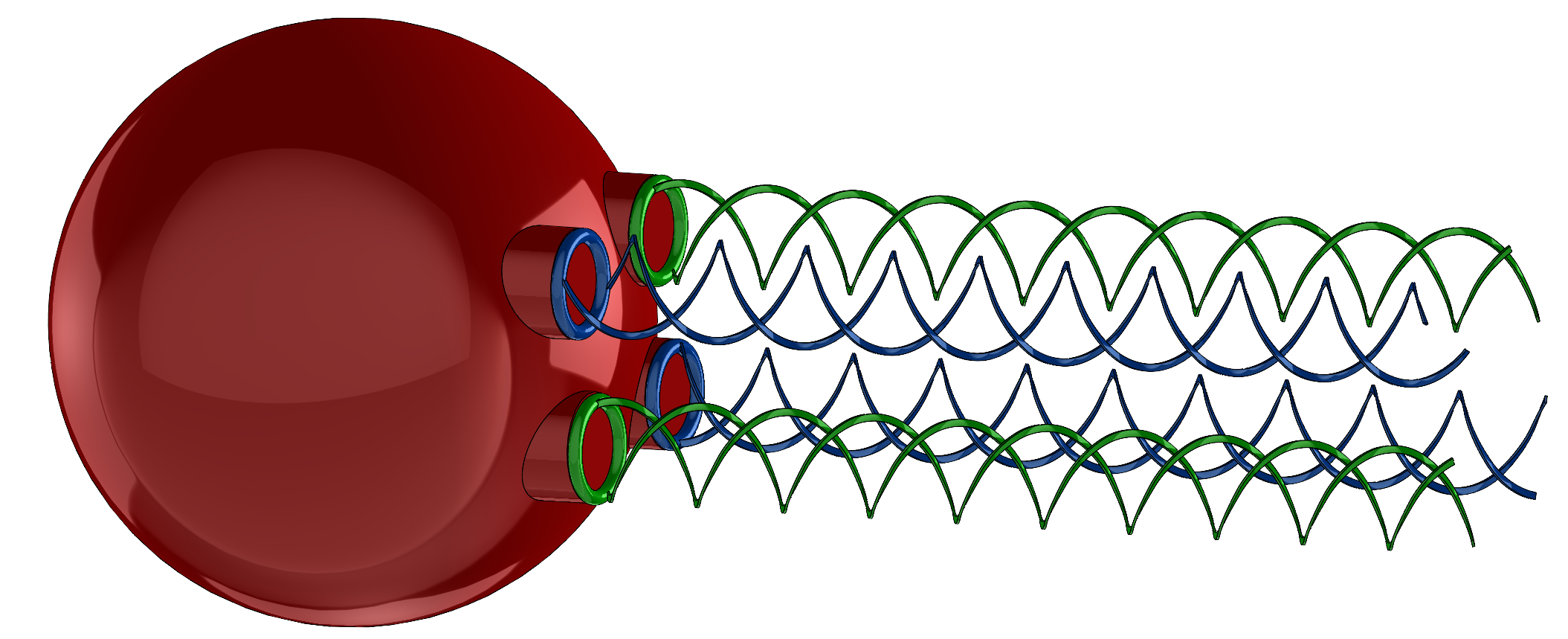
- Design & optimize the E-coli based robot CAD model for 2-D motion in uniform, viscous flow
- Validate the mechanical design by CFD analysis
- Develop a path-planning algorithm for obstacle avoidance
- Design the feedback control model to perform reference tracking